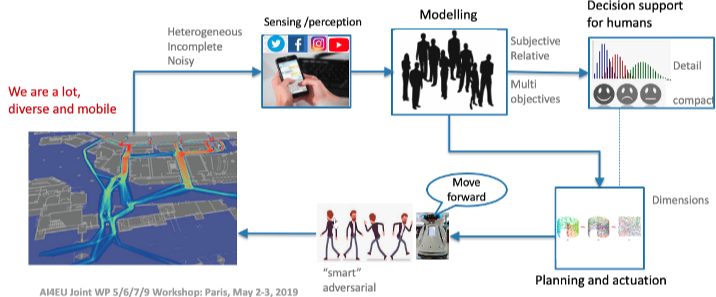
Physical AI refers to the embedding of AI methods and techniques in the physical world.
Physical AI systems take input about the state of the physical world through sensors, or modify the state of the physical world through actuators, or both.
The application of AI in the physical world calls for robust methods that can deal with issues like uncertainty, limited data availability, or limited computational resources. Many AI methods and tools rely on assumptions that do not easily accommodate these issues.